


- 摘出した脊髄の長期生存と人工培養にはじめて成功した
- 脊髄とつながると培養筋肉は自然なリズムで動きはじめた
- 生きた脊髄と生きた筋肉を使ったバイオロボットが完成した
近年の急速な生物工学の発展により、ロボットの部品に生体組織を組み込むことが可能になりました。
以前の研究でも、カエルの筋肉からなる生体ロボット(ゼノボット)に、前進移動する能力を与えることに成功しています。
しかし、機械が筋肉を自由に稼働させるために必要な制御技術は、まだ確立されていません。化学薬品や電気刺激によっても筋収縮の制御は可能ですが、自然とは言い難い方法です。
そんな中、アメリカの研究者が、新生児ラットから摘出した脊髄パーツ(腰椎)を筋肉と神経接続させた結果、自然な歩行リズムで筋肉を収縮させることに成功しました。
これは両者が接続を確立させることで、再び脊髄が筋肉の動きをコントロールし始めたことを意味します。
今回の技術を応用することで、生きている脊髄と生きている筋肉から構成された、より生物に近いバイオロボットの開発が可能となるでしょう。
またこの技術は、脳や脊髄を含む中枢神経を新しい肉体に移す移植技術にも必要なものです。
生きている部品を組み込んだバイオボットは、ロボットの概念をどのように書き換えるのでしょうか?
バイオボットの組み立て
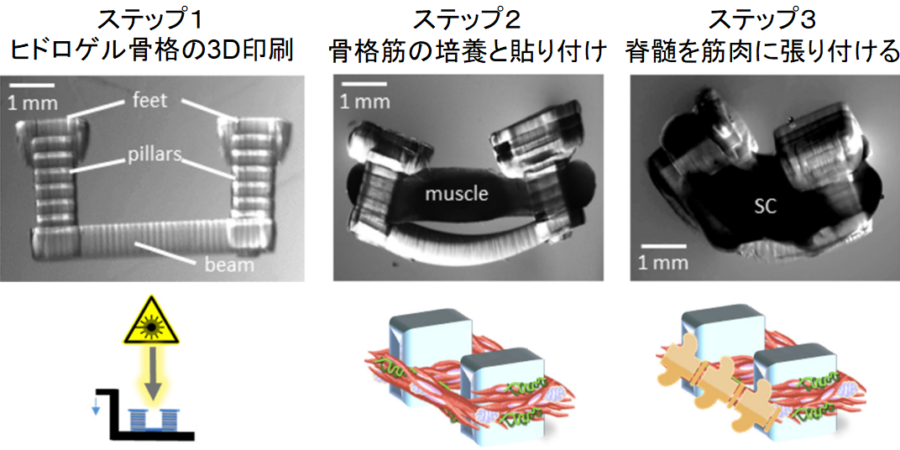
バイオボットの組み立ては、上の図にように3段階に分かれて行われました。
ステップ1ではバイオボットの骨格となる枠組みを3D印刷技術をもって作ります。骨格の素材は柔らかなヒドロゲルでできており、筋肉の動きをトレースしやすくなっています。
ステップ2では筋肉細胞を培養して、骨格にある2本の柱の間に筋肉組織を張り巡らします。
ステップ3では、完成した筋肉の橋に脊髄の後ろ足の制御を行う個所(腰椎)を切り出して貼り付け、神経接続が確立するまで培養を続けます。
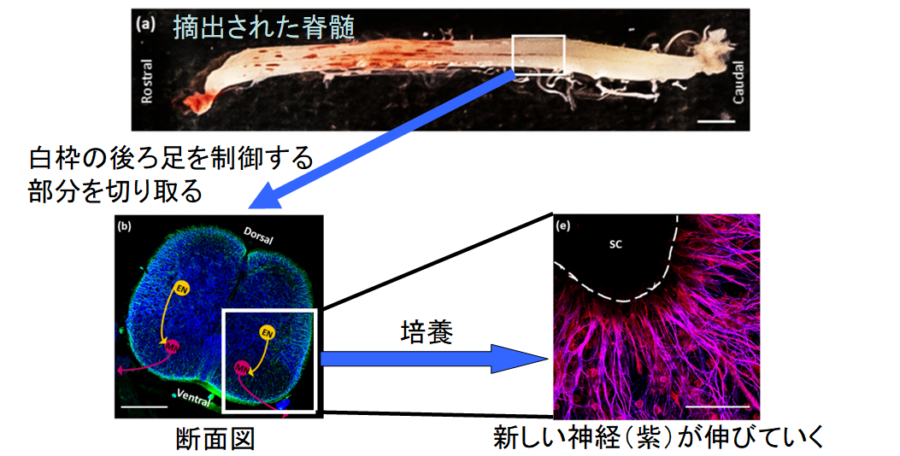
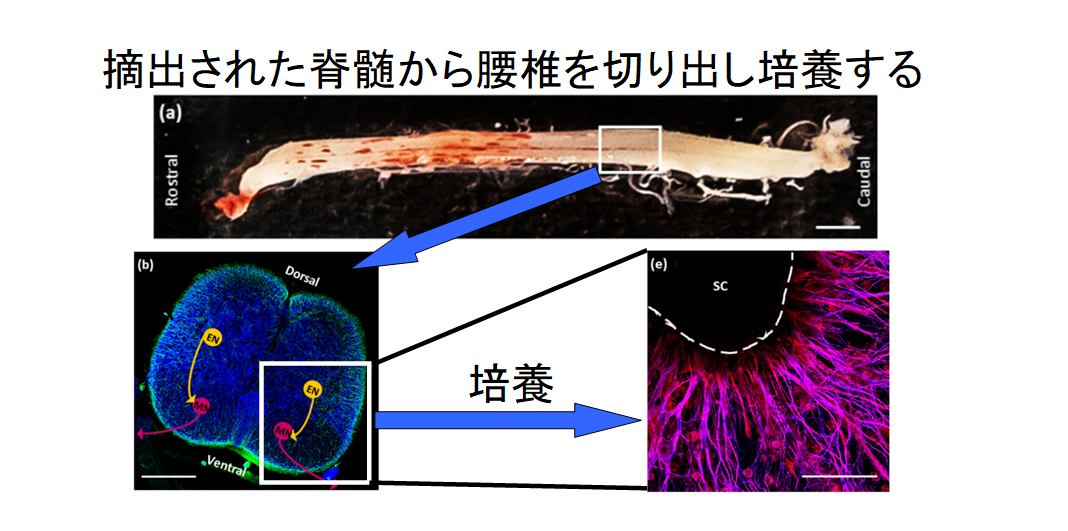
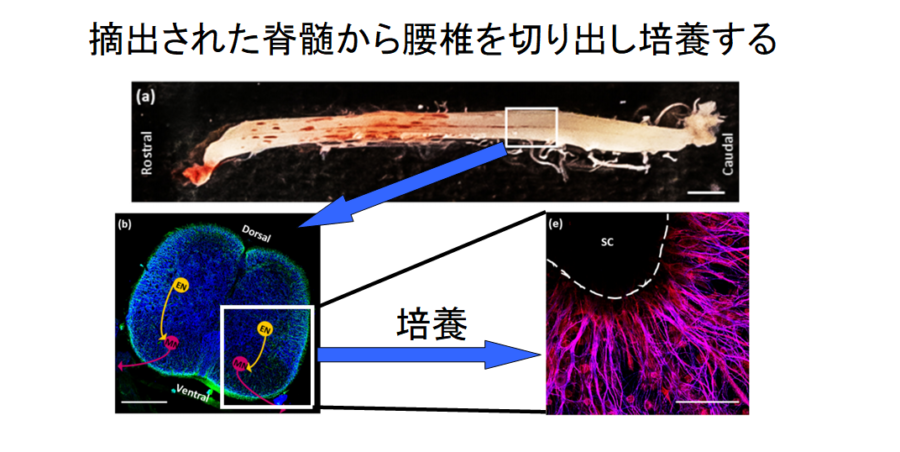
今回の研究の成果の一つに、無傷で摘出された脊髄の培養に初めて成功したという点があげられます。
その結果、上の図のように、生きた脊髄が培養によって新たな神経を伸ばす能力があることが分かったのです。
研究者はこの脊髄の生存能力を利用して、マウスの後ろ足の制御にかかわる部分(腰椎)と筋肉との神経接続を試みました。

脊髄と筋肉を共に培養して7日が経過すると、脊髄から運動ニューロンが伸びて筋肉の収縮を引き起こす電気活動を生成し始めました。
これは生きたまま摘出された脊髄が、筋肉との再結合をはじめたことを意味します。
筋肉が収縮すると骨格も変形し、2本の柱が近づきます。
なお、なぜ神経の再接続に要したのが7日なのかは不明とのことです。