
機械工学のある原理をジャンプに活用していた
研究チームは、小さなコメツキムシが強力な跳躍のエネルギーを放出できる理由を探るべく、X線スキャンを行いました。
これにより、体内の筋肉やその他の軟組織、および外骨格のしくみを明らかにし、動きのプロセスの理解に成功しています。
結果、頭部のすぐ下にある胸部内に「蝶つがい(hinge)」のような構造が見つかったのです。
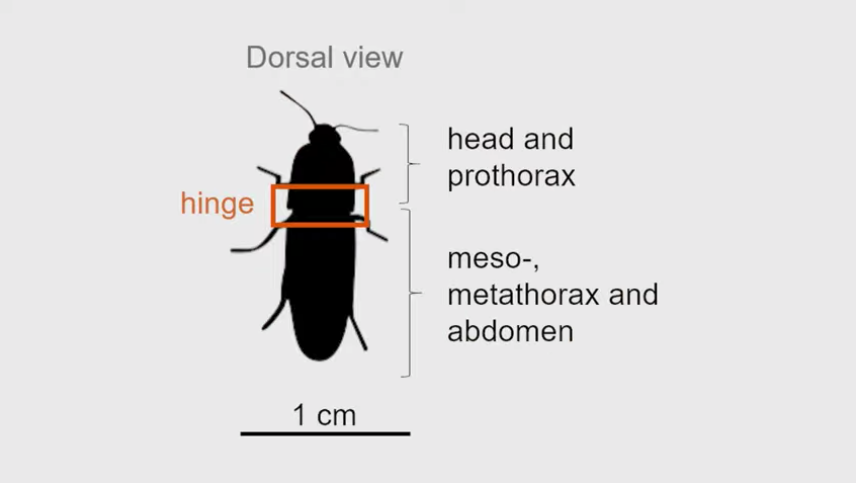
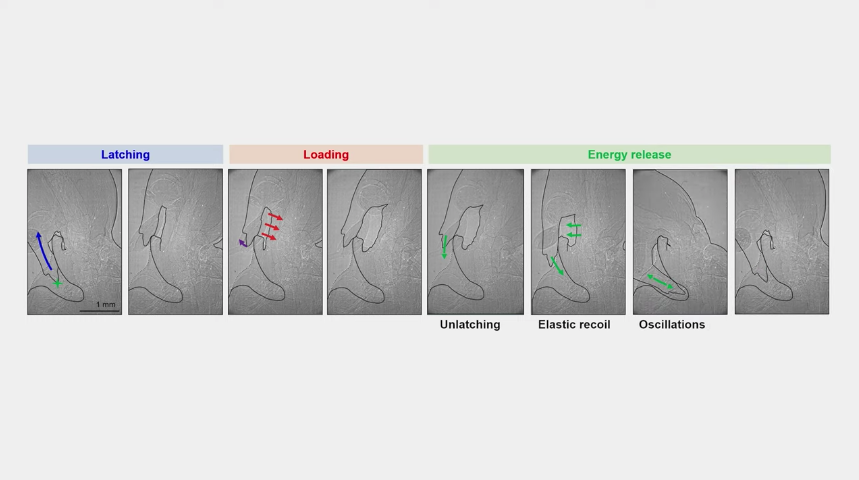
研究チームのマリアンヌ・アレイン氏によると、「コメツキムシの蝶つがいは、前胸部にペグ(peg)がついており、それが中胸部にある突起(lip)にしっかりとラッチ(留め金)された状態にあります。
このラッチが解放されるとカチッとクリック音がして、胸部が”くの字”に曲がり跳躍力が生まれる」とのことです。

ラッチが外れると、胸部の軟組織がものすごいスピードで解放され、ペグはリップとの間の空洞内で前後に振動しつつ次第に停止します。
この筋肉の急速な変形(解放)と、反復しながら徐々に減少する振動は、機械工学における「弾性反跳(elastic recoil)」と「減衰振動(damping)」とまったく同じ原理です。
さらに、跳ね上がりの加速度は、地球の重力加速度(9.80m/s2 )のなんと300倍に達していました。
このエネルギーは、コメツキムシがその小さな体で作り出したものであり、跳躍は体にダメージを与えることなく、何度も繰り返し行えます。
研究主任のオフェリア・ボルミン氏は「この大きなエネルギーを瞬時に生み出すために、コメツキムシは『飛び移り座屈(snap-buckling)』という工学の基本原理を応用している」と説明します。
飛び移り座屈とは、バネなどに見られる不安定現象のことで、両端を固定した状態で曲面を作り、その凸面を押すと向こう側に反転する動きです。
例えば、カンカンのふたでドーム状にふくらんだ面を押していくと、あるところでポコンッと凹凸が逆転します。
あれをコメツキムシは利用していたのです。
ボルミン氏は「この結果は、人の手による工学機械がいかに自然から多くを学ぶことができるかを証明しています。
コメツキムシの効率的なエネルギー生産は、生き物の生態を模倣するバイオミミクリの技術に応用することができるでしょう」と話しています。
新しいロボットのアイデアの多くは、すでに自然界の生き物が実践しているのかもしれません。