



尻尾が衝突エネルギーを吸収していた

本研究チームは、15年以上にわたる研究で、ヤモリの尻尾に、滑空するときの空中での操縦、落下時の体勢の立て直し、握力を失った際の落下防止などの機能を突き止めていました。
今回は、激突のような着地時に落下しない仕組みを解明するべく、シンガポールの熱帯雨林で調査を開始。
アジア圏に分布するヒラオヤモリ(学名:Hemidactylus platyurus)を対象に、ハイスピードカメラで滑空と着地の様子を記録しました。
研究主任のアルディアン・ジュスフィ氏は「ヤモリは飛び立つ前に、頭を上下左右に動かして着地点を確認し、移動距離を推測しているようでした」と話します。
映像の分析から、着地直前の速度は毎秒6メートルに達することがわかりました。これはヤモリの体長にして、1秒間に約120体分を移動できる計算になります。
しかし、着地の様子はどう見てもヤモリにとって好ましいようには見えませんでした。
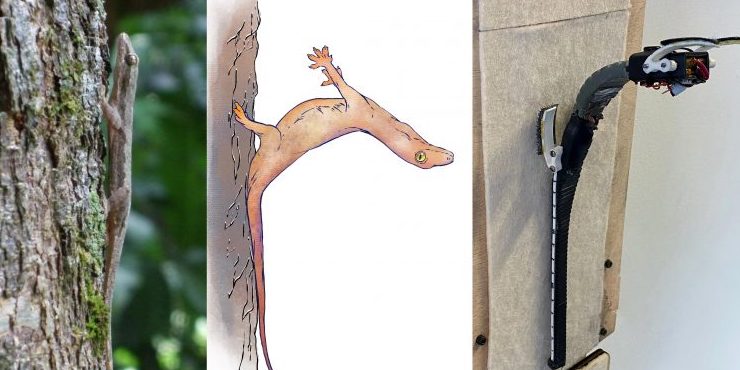
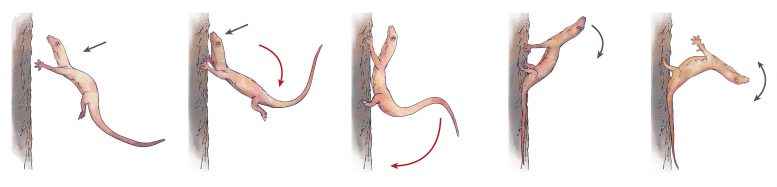
頭から木に激突し、上半身は完全に跳ね返されています。
それでも、上半身がのけ反る一方で、尻尾は幹にピタリと押し付けられ、全身の落下を防いでいたのです。
ヤモリの滑空ルートを調べたところ、着地時にはまだスピードが加速していることが判明しました。
スムーズな着地には滑空スピードが終端速度に達する必要がありますが、ヤモリはまだ加速しているために、激しくぶつかっていたのです。
しかし、スローモーション映像を確認してみると、ヤモリはまず上半身から衝突して反発力を受けた後、後脚と尻尾を幹にしっかり固定して、衝撃エネルギーを吸収していました(下図)。
研究チームは、このメカニズムを数学的にモデル化して、ソフトロボットを作成し、その効果を実験することにしました。