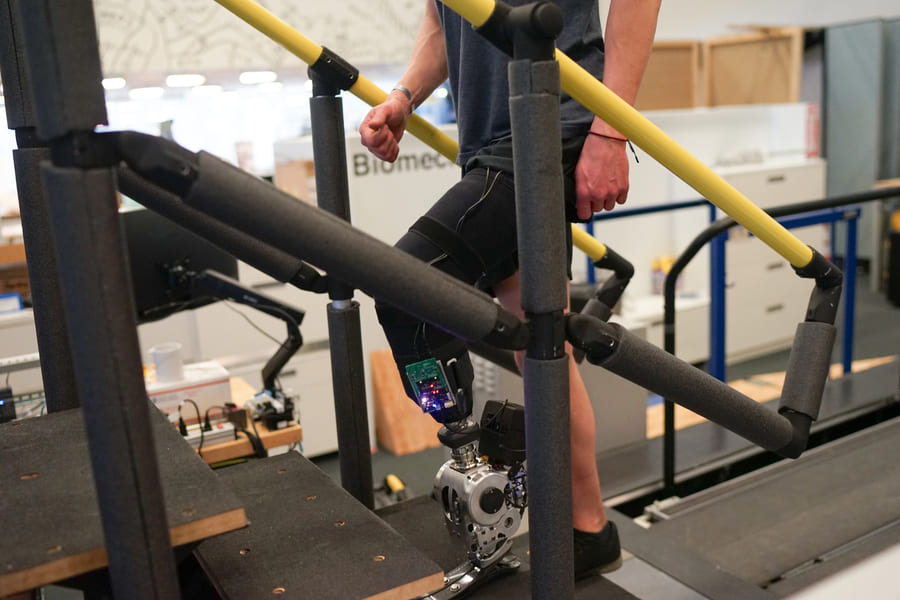





人間の歩行はどれくらい効率的なのか?
外骨格歩行装置を開発するには、まず人間の歩き方や走り方について詳しく把握しなければいけません。
外骨格歩行装置のはじまりは、「人間の歩行と走行の効率」を学ぶことだったのです。
では、これまでの研究によってどんなことが分かっていますか?
まず、ランニングの消費カロリーのうち、前進するために使われているのはわずか8%だけのようです。
残りの92%の大部分はブレーキに消費されています。
この点だけを考えると、「外部装置で効率アップさせる余地は大いにある」と感じるかもしれません。

また研究者たちは、歩行の基礎を説明するために、単純化した倒立振子モデルを開発しました。
この倒立振子モデルでは、歩行の一歩が振り子のスイングに当てはまります。
地面についた前足が振り子の支点であり、体また腰が振り子のおもりに例えられるのです。
これにより、人間にとって最も効率のよいピッチは1分間に100歩だと判明。
そして次の段階では、「人間の歩行をロボットに模倣させる」ことで、歩行に対する理解をさらに深めてきました。
1990年代の研究者は、倒立振子モデルを利用して、電源なしで傾斜面を歩く「パッシブウォーカー」を設計。
これにより、人間の歩行動作は本質的に安定しており、ほとんどエネルギー入力を必要としないと判明しました。
そしてこれらの研究が、現在の「歩行可能な人型ロボット」開発につながっています。
また2000年代初頭には、別ルートに派生した研究グループが登場。
彼らは歩行理論で「歩くロボットを作る」のではなく、「歩行者を強化する」ことを目的としたのです。
こうして本格的な「外骨格歩行装置」開発が始まりました。