




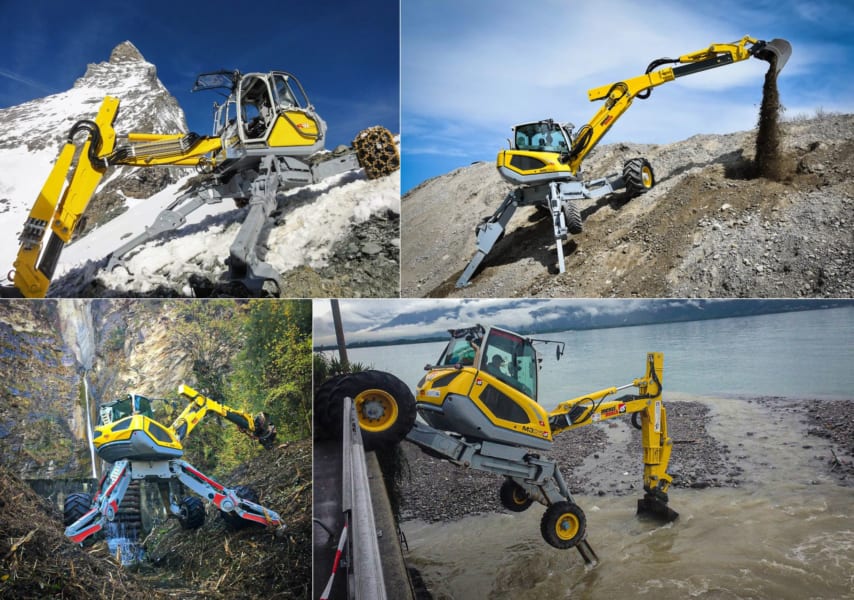
複雑な地形で作業する「ウォーキング・ショベルカー」
「メタルギア」や「アーマード・コア」シリーズなど、有名なゲームに登場する多脚ロボットは根強い人気を誇ります。

クモのような滑らかな動きとロボット特有の重厚感の組み合わせが、私たちの心をくすぐるのでしょう。
こうした多脚型の乗り物はSFの存在と考えられがちですが、実の所はかなり昔から現実に存在してきました。

1966年、ヨーゼフ・カイザー氏とその友人アーネスト・メンジ氏が最初のウォーキング・ショベルカーを作りました。
スイスのアルプス山脈における険しい勾配や複雑な地形で作業するために開発されたもので、プロトタイプは後部を車輪、前部を脚にしたシンプルな構造でした。
現在では、この2人がそれぞれ別の会社「カイザー社」「メンジ社」で、クモのように歩くショベルカーの開発・販売を続けています。

最新の四脚型ショベルカーは、まさに「動く巨大グモ」のような存在です。
それぞれの脚に伸縮性が備わっており、股、膝、足首に関節があります。
これにより、複雑な地形に合わせて脚の長さや角度を変え、体勢を維持できます。

また製品タイプによっては脚の先に車輪や鋼鉄製の爪が装備されており、素早く移動できるだけでなく、一般的な重機が滑り落ちるような急斜面でも作業を続けられるようです。
さらに複雑な地形を進むためには、腕や手のように扱えるショベルアームが重要な役割を果たします。

このショベルアームには、ショベルカーの2倍の重量にも対応できる力が備わっています。
この並外れたパワーによって機体を持ち上げ、身の丈以上の段差を上ることが可能なのです。
もちろん99%の作業では、普通の「キャタピラ型ショベルカー」で十分でしょう。
それでも残り1%の過酷な環境では、クモのように自由自在に動ける四脚型ショベルカーが役立ちます。
私たちが憧れてきた「四脚型重機」は現実に存在します。
もし独特の重厚感と繊細な動きをリアルで体感したいなら、カイザー社やメンジ社が出品する展示会に出向き、そこで行われるデモンストレーションを楽しむと良いでしょう。