




「走って、飛んで、しゃがんで、立つ」多彩な移動モード
M4を開発した目的は、一台のロボットの内に多彩な移動モードを組み込んで、移動ロボットの限界を押し広げることです。
M4にはAI(人工知能)が搭載されており、目の前の地形や障害物を認識して、その環境に合った最も効果的な移動モードに自動で変形できます。
まさにトランスフォーマーと同じ仕組みです。

例えば、M4が見知らぬ土地を探索するところをイメージしてみましょう。
初めは最もエネルギー効率がよく安定した4輪で進みますが、岩や縁石のような障害物に出くわして前方が見えなくなると、2輪で垂直に立ち上がって、障害物の向こうの状態を確認できます(Tumbling)。
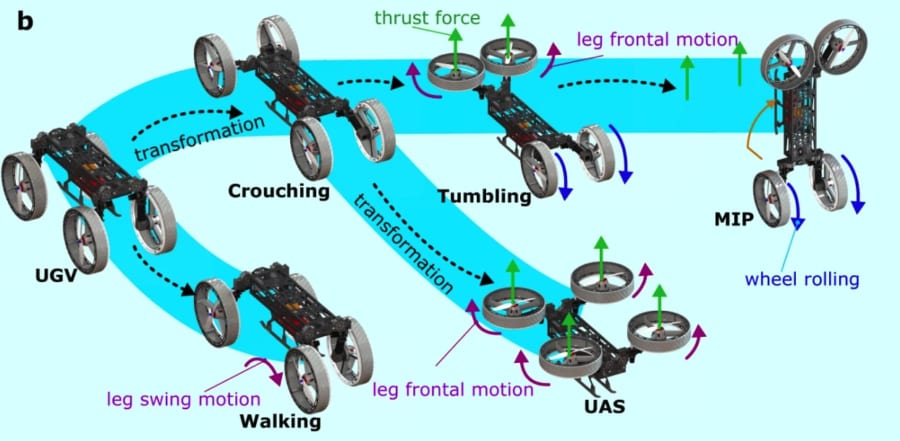
ギリギリで頭がぶつかってしまいそうな隙間には、車輪を前後に伸ばして車高を低くすることで対処(Crouching)。
さらに4輪走行ではバランスの取れないデコボコの地面では、4輪をバラバラに動かし、まるで四足歩行で歩くように移動します(Walking)。
そして目の前に崖や川が現れ、これ以上進めない状況に直面すると、今度は4つの車輪を折り畳んでローター(回転翼)にし、空を飛んで向こう側に移動することが可能です。
それぞれの車輪はプロペラになっています。

動物たちの動きをヒントに
こうしたM4の機能は、自然界の動物からインスピレーションを得たとのことです。
例えば、4輪を交互に動かす歩行には陸に上がったアシカのヒレを動かし方を参考にしたり、2輪での直立には普段は四足のミーアキャットが立ち上がるときの動きをヒントにしています。
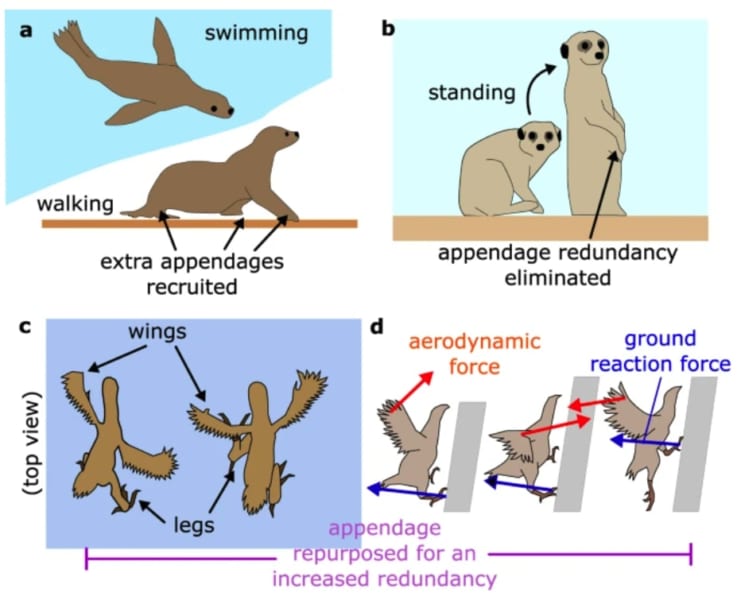
それから2輪での前身移動には、キジ科の一種であるイワシャコを参考にしました。
イワシャコは急勾配を二足で駆け上がる際、翼を同時に動かしてバランスや推進力を得ながら前進します。
そこでM4も下側の2輪はそのままタイヤとして使いながら、上側の2輪をローター(回転翼)にすることで前方への推進力を生み出したり、バランサーとして活用したのです。

ではM4は差し当たって、どんな現場で活躍できるのでしょうか?