




失った足の運動リズムが逆転!
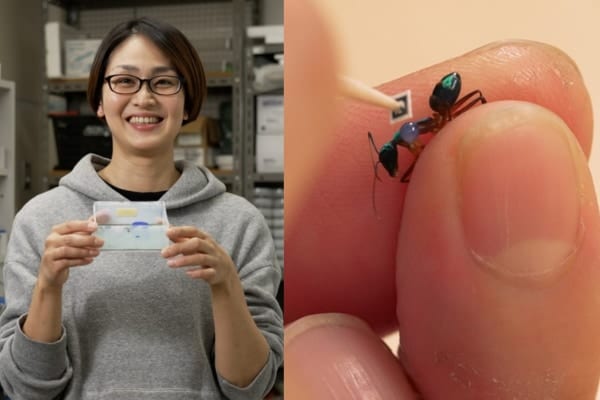
研究チームは、「クロコオロギ」をモデル生物として、3対(計6本)ある足の真ん中を左右ともに切断しました。
実験では、中足の切断前後における歩行中の足の動きと筋電位を計測します。
筋電位とは、足の動きを生成する筋肉活動のことで、切断前後でも感覚器官や運動器官への影響を最小限におさえて計測できる生体信号です。

その結果、最初にわかったのは、コオロギの歩き方の変化でした。
切断前は、片側の前後の足2本と、反対側の中足1本を同時に着地させる「トライポッド歩行」となっています。
具体的には、右前足と右後ろ足、左中足を同じタイミングで接地させ、次にそれを浮かしていた3本と入れ替えながら前進します。
ところが中足の切断後は、残っている4本の足の対角線同士をペアにした、4足動物に見られる「トロット歩行」に変化していたのです。
つまり、右前足と左後ろ足、次に左前足と右後ろ足を交互に接地させていました。

さらに、もう一つの大きな変化は、切断された中足の運動リズムが逆転していたことでした。
中足の筋電位を見てみると、切断前はトライポッド歩行のため、筋肉の収縮するリズムが左右で違っています。
しかし、切断後は、中足の筋収縮リズムが同じになっていたのです(上図の赤枠と青枠)。
このことから、2点の新たな事実が示唆されます。
1点目は、昆虫に、左右の中足のリズムを一致させる神経回路がもともと存在すること。
2点目は、そのパターンが、足に伝わる感覚刺激によって新しいデータに書き換えられ、健常時の左右逆転のリズムが生成されることです。
研究チームは「このメカニズムの理解は、より本物に近い昆虫型ロボットの開発に応用できる」と述べています。
足がとれても歩き続けられるロボットが作れるかもしれません。