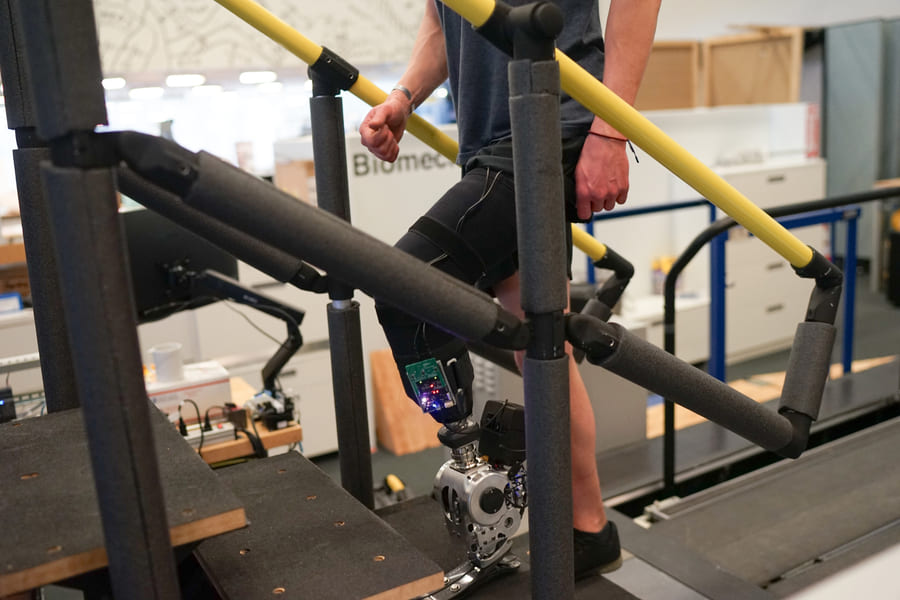



エネルギーを全放出する前に地面を離れてしまう!ジャンプの難しさ
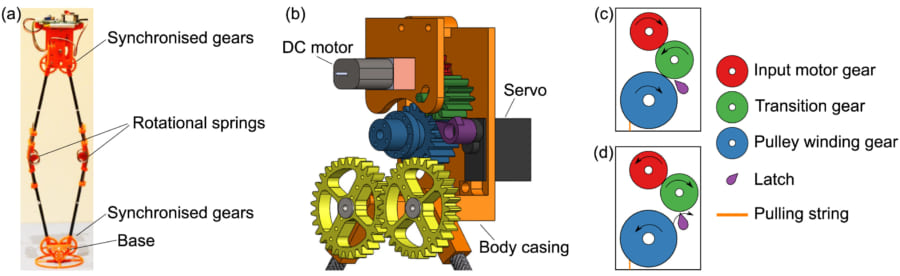
ほとんどのジャンピングロボットはバネに依存しています。
バネは変形に伴い弾性エネルギーを蓄えるため、これを解放することで、高く跳び上がることができるのです。
この原理を利用したジャンピングロボットは、これまでにたくさん考案されており、これらのロボットには、移動が困難な地形(洞窟、森林、他の惑星など)を探索することなどが期待されています。

しかし、こうしたジャンピングロボットは、「そこまで高く跳べない」ことも少なくありません。
では、どうしてジャンプ専門のロボットが高く跳べないのでしょうか。
それは、バネのエネルギーが完全に解放される前に足が地面から離れてしまうからです。
これはつまり、蓄えられた弾性エネルギーが運動エネルギーに完全に変換されていないということになります。
また逆に、ロボットの離陸のタイミングが遅れてしまっても、高く跳びあがることはできません。
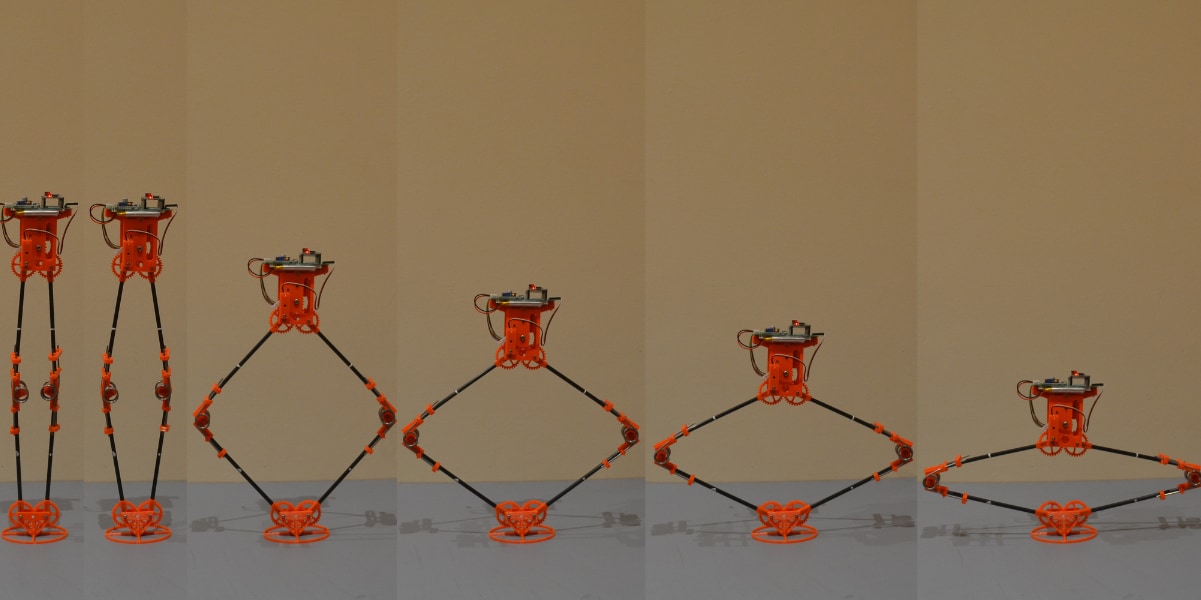
さらに、ジャンプ型のロボットは、設計がさいてkジャンプの軌道が左右に逸れたり回転してしまい、上昇エネルギーを無駄に消費してしまいます。
今回、ジョン・ロー氏ら研究チームは、それらの課題に取り組むことにしました。
彼らはジャンプ機構を分析することで、効率的ではないエネルギー変換が、回転運動やバネの下にある質量にもとづく「慣性の効果」に起因することを発見。
そして、そのマイナスの効果をなるべく無くしたシンプルな設計を生み出すことに成功したのです。