ロボットに「ダンベル何キロ持てる?」か推測させる
目の前にダンベルのような重い物体があった場合、私たち人間はそれを持ち上げることができるか、どのように推測しているのでしょうか?
私たちはダンベルに軽く触ってみて大体の重さを感じたり、外観から重さを推定して、それを過去の経験と照らし合わせています。そのあとに重すぎて無理、またはいけそう、と判断を下すのです。
そこで研究チームもシミュレーションを使って、荷物の物理的パラメータに応じた動作の軌道表を生成し、ロボットに保存しました。
ロボットはその軌道表を、私たちでいう過去の経験として利用していきます。

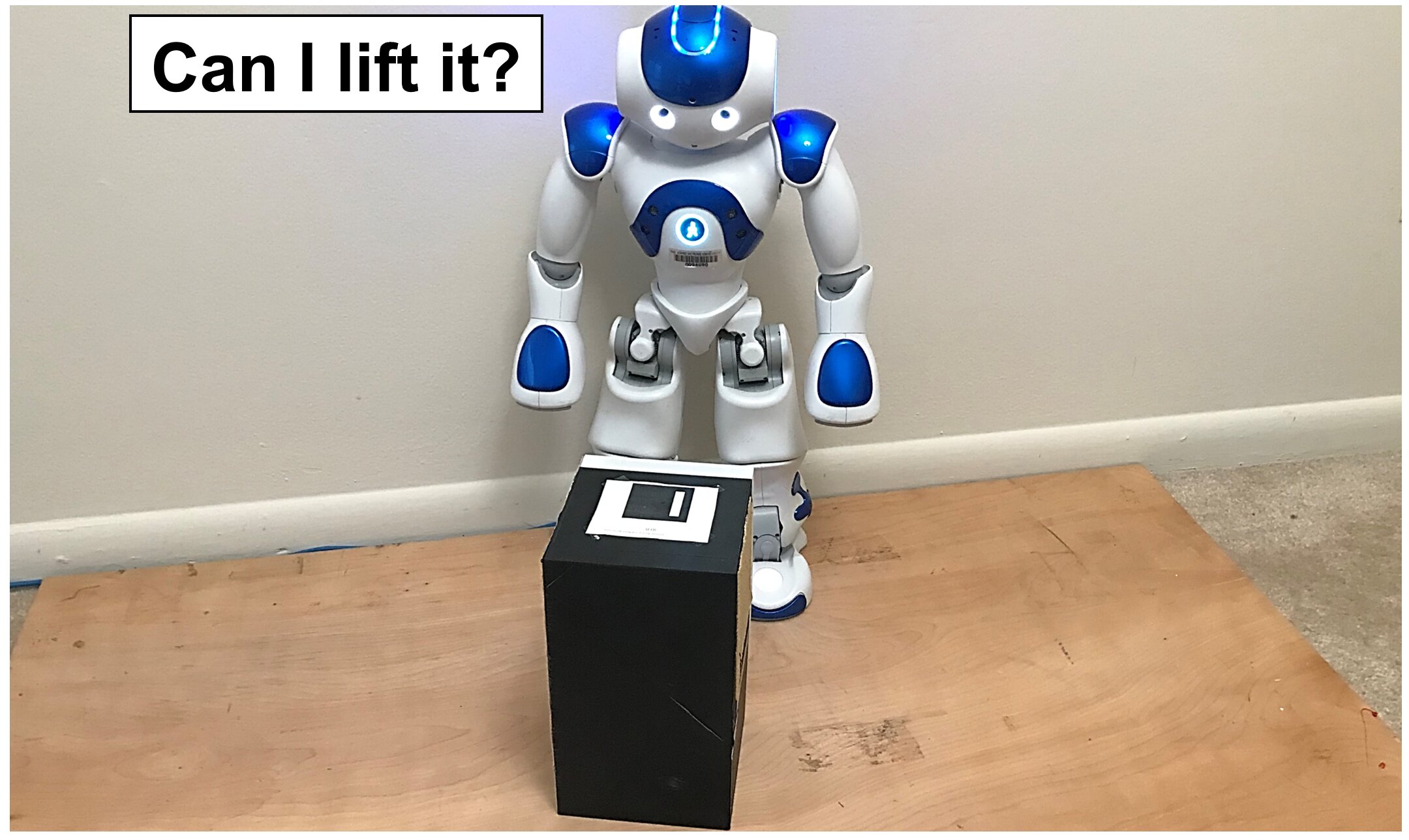
この研究で開発された技術では、ロボットが箱を触った直後に、箱の物理的パラメータを取得できます。
ロボットはそこから得られた情報を元に、軌道表を確認して、その箱を持ち上げられるパターンが存在するかをチェックするのです。
当然、パターンが記録されていればロボットはこの箱を運ぶことは可能だと判断します。もし、パターンが存在しない場合、ロボットはこのタスクは自分の能力を超えていると考えます。
本質的にこれは私たちがやっていることと同じです。この方法なら、毎回新たな動作を生成する必要がないため、時間と計算量を節約でき、迅速な判断を行うことが可能です。