



シチュエーションに応じて「泳ぎ方」を使い分けている
本種を含むクダクラゲ目は、正確にいうとクラゲとは別グループに分けられます。
クラゲは主に、一つの傘状ボディからなる「単体」ですが、クダクラゲは、多数の個体からなる「群体」です。
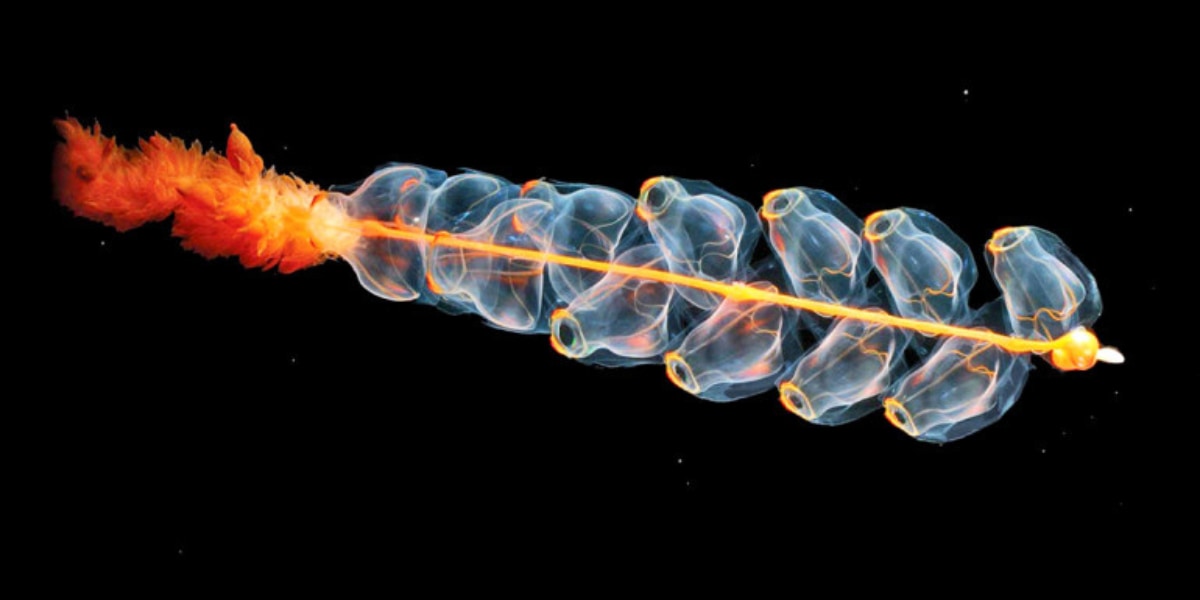
なので、シダレザクラクラゲの紐状部分に連なるベルのような器官は、一つ一つが生きた個体と言えます。
このベルのような器官は「ネクトフォア(nectophore、水泳ベル)」と呼ばれ、ジェット推進を生み出す重要な部分です。
ネクトフォアは柔軟な開口部から海水の流れを取り込み、ポンプのように伸縮させることで後方への噴流を生み出し、その反動で前進力を得ています。
(ちなみに、後方に付いている触手は摂食や繁殖の役割を担っている)

イカやクラゲなど、ジェット推進を利用する海洋生物はたくさんいるものの、ほとんどは1つのジェットしか持っていません。
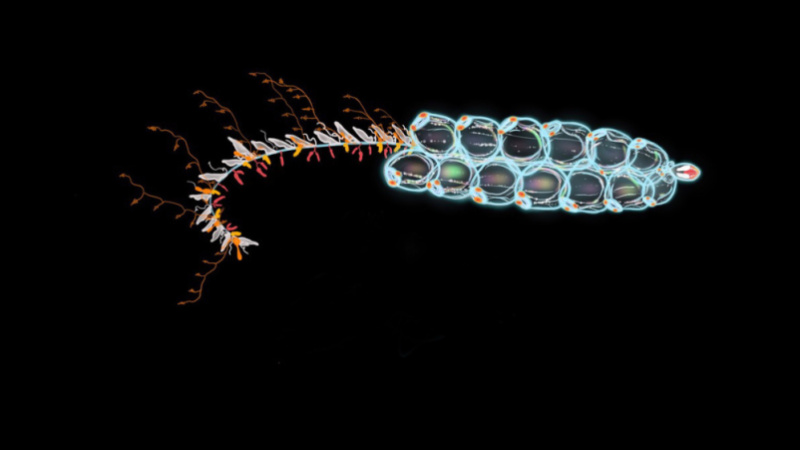
一方でシダレザクラクラゲは、10〜20個ほどのネクトフォアを備えており、しかもそれぞれを個別にコントロールできるのです。
たとえば、すべてのネクトフォアの動きをシンクロさせることも、片側(あるいは一部)だけを起動させて、体の向きを回転させることもできます。
ヨットの乗り手が片方のオールだけを動かして、向きを変えるイメージに近いでしょう。
研究チームは今回、これら2種の異なる泳ぎが遊泳スタイルにどんな影響を与え、いかなる進化的利点を持っているかを明らかにしたいと考えました。
そこでチームは、野生のシダレザクラクラゲを捕獲して研究室の水槽内に移し、ビデオ撮影とコンピューターモデルを使って遊泳パターンを分析。
その結果、2種の泳ぎ方はそれぞれ異なる状況に適していることが判明しました。
まず、すべてのネクトフォアを同期させる”シンクロ泳法”は、スピードに特化しており、速く前進させることで、捕食者から素早く逃げるのに適していました。
しかし、シンクロ泳法は突発的な推進力を生み出すため、多大なエネルギーが費やされます。
一方で、ネクトフォアを個別に動かす”バラバラ泳法”は、より柔軟でコントロール力に優れており、泳ぎにかかるエネルギー効率も非常に良いことが分かりました。
またスピードとエネルギー効率の両方は、ネクトフォアの数が多いほど向上し、およそ12個でプラトー(グラフ上で数値の上下変動がなくなる平坦域)に達しています。
以上のことから、シダレザクラクラゲはシチュエーションに応じて、スピードに特化した泳ぎとエネルギー効率に特化した柔軟な泳ぎを使い分けられると結論されます。
ジェット推進を持っている他の海洋生物では、大抵そのいずれかにしか特化していません。
よってシダレザクラクラゲの複雑かつ精巧な動きは、自然界にインスピレーションを求めるエンジニアにとって有益な情報となるでしょう。
研究主任のケビン・デュクロ(Kevin Du Clos)氏は、こう話します。
「シダレザクラクラゲは、多様な遊泳能力を持つロボットを開発するためのフレームワーク(枠組み)を提供してくれます。
たとえば、水中ロボットに複数の推進器を搭載し、推進タイミングを変えるだけで、効率的に移動させたり、突発的なスピードを生み出すことも可能でしょう」
人類がかつて鳥を見て飛行機を思いついたように、未来的な乗り物の発明には、まだまた生き物から学ぶことがありそうです。